1. 논문 분석
Neural Network-Based Cost-Effective Estimation of Useful Variables to Improve Wind Turbine Control
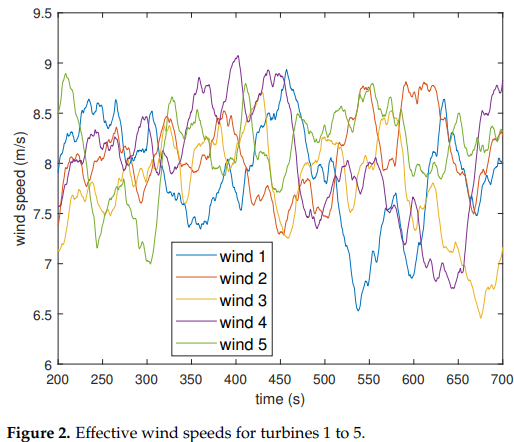
🔷2.1 wind speed
사용하는 모델은 5개의 풍력 터빈이 있는 클러스터로, DNV의 bladed 모델을 이용해 계산된 풍속을 사용한다. 터빈이 실제로 받는 풍속인 유효 풍속(effective wind speed)은 날개가 도는 면 전체의 풍속을 평균을 낸 값이다.
아래는 논문에서 사용된 유효 풍속이다.
2.2 2.3 2.4
rotor와 aerodynamic 토크, drive-train 토크, induction generator dynamic 등에 관한 식
🔷2.5 전체 범위 제어 (full envelope control)
논문에서 사용한 제어 알고리즘은 MPC(model predictive control) 이지만 LQG나 H infinity 제어도 사용할 수 있다.
- 구간1과 구간3에서는 터빈의 속도를 일정하게 유지한다.
- 구간2에서는 Cpmax 곡선을 추종한다.(최대 풍력 에너지 추출을 위해)
- 구간4에서는 풍속이 너무 높을 때 정격전력을 넘지않도록 stall 한다.

각 mini grid(소규모 전력망)의 주파수는 AC DC AC 변환기를 통한다. 이를 통해 가변 속도 제어 방식을 사용할 수 있다.
3. 신경망 기반 Estimator
여러 대의 터빈 중 한 대에만 라이다(LiDAR) 센서를 설치하고 나머지 터빈에는 neural network 기반 비선형 추정기를 설치한다. 논문에서는 풍속과 aerodynamic torque 변수를 대상으로 추정한다.
🔷3.1 기존의 풍속 추정기
- 풍속 추정
로터의 회전속도, aerodynamic torque로 TSR을 구하고 풍속 V를 추정할 수 있다.
- 토크 추정
발전기 토크 측정값을 이용해 aerodynamic 토크를 추정한다.
기존 방법은 수학 모델을 기반으로 한다는 것을 알 수 있다.
🔷3.2 neural network 기반 추정
Double-Layer Perceptron 구조의 피드포워드 신경망
모델 구조
- 입력: 과거의 입력값과 출력값
$u(k-\tau),\cdots, u(k-n_{b}), y(k-1),\cdots, y(k-n_{a})$ - 출력: 예측하려는 현재 출력
- 은닉층: K개의 노드이며 활성화함수는 tanh(x)
- 출력층: 하나의 노드
$$\sigma=\sum^{np}_{k=1} (\tilde{y}(k)-y(k))^{2}$$
위 식에서 $y(k)$는 실제 측정값(정답)이며 $\tilde{y}(k)$는 신경망의 출력 값이다.
즉 오차 제곱 합을 최소화하도록 levenberg-marquardt 알고리즘이 사용되며, 자코비안 행렬을 통해 계산한다.
데이터는 70%를 학습, 20%를 테스트, 10%를 검증용으로 분할한다.
estimator 절차 요약
- 센서 및 신경망 estimator 설치
- 센서가 있는 터빈에서 입력과 출력 데이터 수집
- 발전기 토크, 발전기 속도, 전후방 가속도(FAA), 타워 굽힘 모멘트(TBM) → aerodynamic 토크
- 발전기 토크, TBM, FAA → 풍속
- 데이터를 바탕으로 비선형 추정기 설계 및 학습
- 학습된 estimator를 장착해 풍속, aerodynamic 토크 추정
- 1000초마다 반복
목적은 공력 토크 추정과 풍속 추정에 있다.
입력 변수의 조합에 따라 여러 시나리오로 나눠서 테스트를 진행했다.
공력 토크 추정을 위한 시나리오로
1. 로터 속도, 발전기 속도, TBM
2. 발전기 토크, 발전기 속도, TBM
3. FAA, 로터 속도, TBM
풍속추정을 위한 시나리오로는
4. 발전기 토크, 로터 속도, TBM
5. 회전자 속도, FAA, TBM
🔷3.3 추정 결과
공력 토크 추정
- 시나리오 1: 더 정확히 추종하지만 주파수 영역에서는 뚜렷한 차이가 보이지 않음
- 시나리오2: 주파수 영역에서도 더 향상된 모습을 보임
- 시나리오3: 주파수 영역에서 더 더 향상, 가장 효과적
풍속 추정
- 시나리오4: 기존 추정기보다 향상된 결과
- 시나리오5: 시나리오4보다 명확히 개선되어 더 적절
🔷4. 향상된 공력 토크 추정을 이용한 제어
풍속이 8, 10, 14인 상황에서의 동작
제어기의 차이를 비교하려면 aerodynamic torque-rotor speed 그래프를 보는 것이 더 적절하다.
(토크-속도 평면에서의 곡선을 추종하도록 설계되었기에 시간 영역에서는 차이를 보기 힘들다.)

전체 전략 곡선을 NN기반 estimator가 더 정확하게 추종한다.

전력효율 측면에서도 향상된 결과를 볼 수 있다.
🔷5. 결론
풍력 터빈이나 풍력 발전단지에서 일반적으로 측정되지 않는 변수를 추정하는 방법을 제안함. NN 기반 estimator를 이용해 비용을 크게 줄일 수 있음. 본 논문에서는 풍속과 공력 토크에 초점을 맞춤. 추정값들은 기존 estimator보다 실제 값에 더 가까웠음.
2. 매트랩 시뮬링크 구현
MATLAB 신경망 학습 및 시뮬링크 연동 방법회귀용 신경망인 `fitnet()` 을 이용해 모델을 생성할 것이다. 첫 번째 파라미터로 hidden layer의 노드 수가 들어간다.두 번째 파라미터로 알고리즘 명이 들어
studentstory.tistory.com